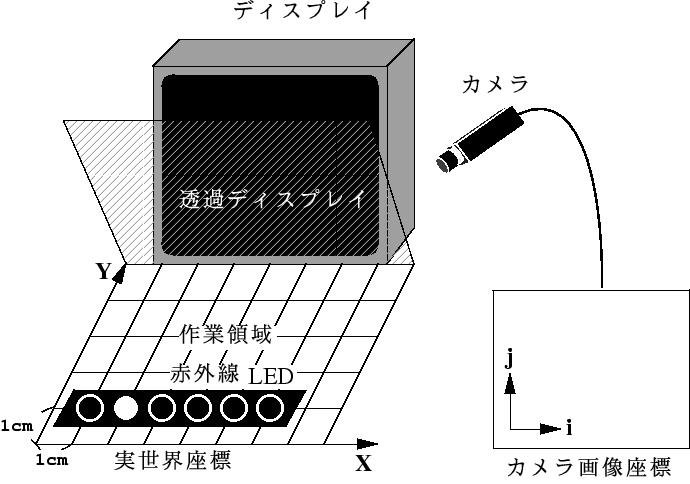
図2のように、カメラは左右上方から俯瞰しているため実世界の 座標は歪んで撮影される。そこで、カメラキャリブレーションを行い、実世界座標と カメラ画像座標とを関係付ける[8]。ここでは、レンズ歪や実装の 容易さを考慮して、ルックアップテーブル方式で行なう。本格子内の点はBi-linear補 間を施し、後述のカメラを使用した場合、作業平面内を約2mm以下の精度でキャリブレー ションが行えた。
キャリブレーションを行なうため、PCのパラレルポートに接続されたデジタルI/Oを用い て既知の座標に設置された赤外線LEDを点滅させる。赤外線LEDは、薄い棒 状の治具の上に1cm間隔で1列に配置し、図4に示すように作業領域 内に設置する。赤外線LEDを順々に発光させつつ、本治具を1cm間隔で移動させ、作業領 域内すべての格子点の撮影を行う。