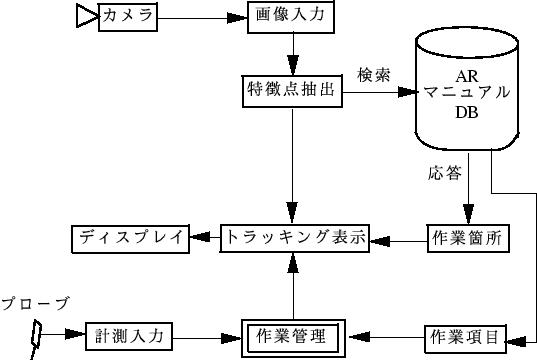
本システムの処理の流れを図3に示す。この図のように、作業手順 はPC内のデータベースに蓄積されている。カメラから取得された作業対象の特徴点配置 に基づき対象の種別が同定され、種別毎の作業項目と作業箇所の情報がデータベースよ り動的に引き出される。特徴点のトラッキング情報に従い、対象上の作業箇所上に強調 マーカがスーパーインポーズされるとともに、グラフィカルな作業指示が作業者に与え られる。この時、計測器からのデータは作業項目の目標値と比較され、条件が満たされ れば次の作業項目に自動的に移る。
図3: システム処理フロー