


Next: Carrying System
Up: A Wearable AR-based Inspection
Previous: Abstract
In this section, we introduce an idea of a AR-based inspection
system which augments inspection processes, as shown in
Fig. 1. Conventional VR systems have fatal problems when
applying to industrial inspection processes both indoor and outdoor. The major
problems should be concerned as follows. When a human operator wears a HMD
which is opaque one and displays only virtual scenes,
- the operator can not avoid dangerous situations, i. e. closing mobiles, powerful machine
tools or real steps of road, because the HMD is not see-through,
- usual VR systems can not be carried out of laboratory, because the measurable area of popular
position/attitude sensors to be attached to the operator's head is so narrow and limited, such as
mechanical arms, ultrasonic sensors, magnetic sensors which need transmitter coil modules and so on,
- conventional VR systems are too heavy and large to be carried, because they are usually
implemented on graphic workstations.
In order to solve the above three problems, the following necessary conditions arise.
- In order to walk anywhere and to avoid unexpected dangerous happenings, the operator wearing
the HMD needs to see the real environment all the time.
- the position/attitude sensors to be attached to the operator's head should be independent and
stand-alone.
- All equipment to be carried by the operator needs to be implemented in
light weight and compact size.
In order to satisfy the above mentioned conditions, the ideal AR-based
inspection system should use a) see-through HMD, b) inertia navigation and c)
PC-based hardware. Because the inspection data is provided from a host
CAD/CAM station with a large database, the system have to be split into a
carrying system and a host system with a wireless data-communication channel.
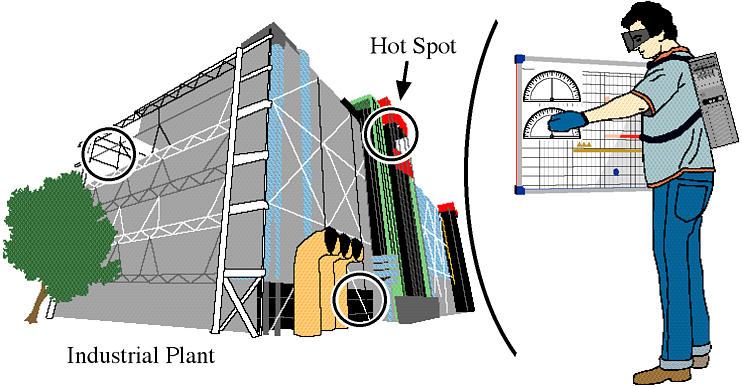
Figure 1: Comceptual idea of VR based inspection system.
Yoshihiro Ban (yosihi-b@is.aist-nara.ac.jp)
Wednesday, September 9, 1998