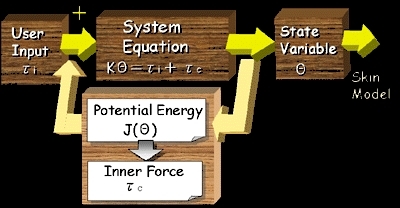
 System Equation
System Equation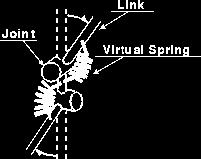 Natural Posture
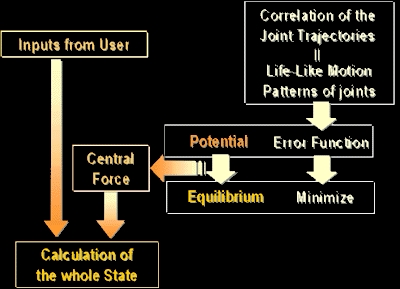
Natural PostureIn this research, the unnaturalness of a hand posture is modeled by a potential energy function. Thus, the goal of generating natural hand posture can be achieved by producing a hand posture of which the potential energy is zero, or as small as possible. The potential energy can give forces to decrease itself. We apply these forces to the skeletal model to adjust the joint angles. As a result, the hand posture will have less potential energy, and thus become more natural. We use these ``forces'' as natural motion constraints and call them ``inner forces''.
The posture determination system is composed of the skeletal model and
the dynamic system. We put virtual springs on joints in the skeletal model
to express the rigidity of the joints. Once the user input
is given to the system, potential energy is changed and inner forces
are generated. The output of the process is determined as a
equilibrium state of the dynamic system. The computed posture is
expressed by the joint angles and is used to generated a hand shape in
the skin model.