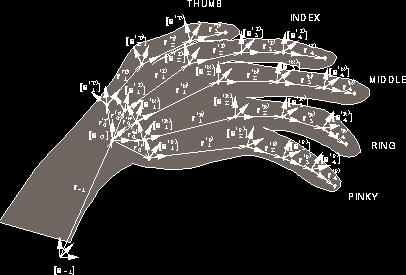
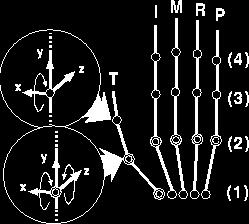
Skeletal Model
The position of the hand is described by the 3D coordinates of the
wrist(root) relative to the world coordinate system. Then the posture
of each link, where one end is connected to the root(wrist), is
described by a vector, represented under a local coordinate
system fixed at the wrist.
[Next] "Posture Determination"
[Project Summary] [Home]