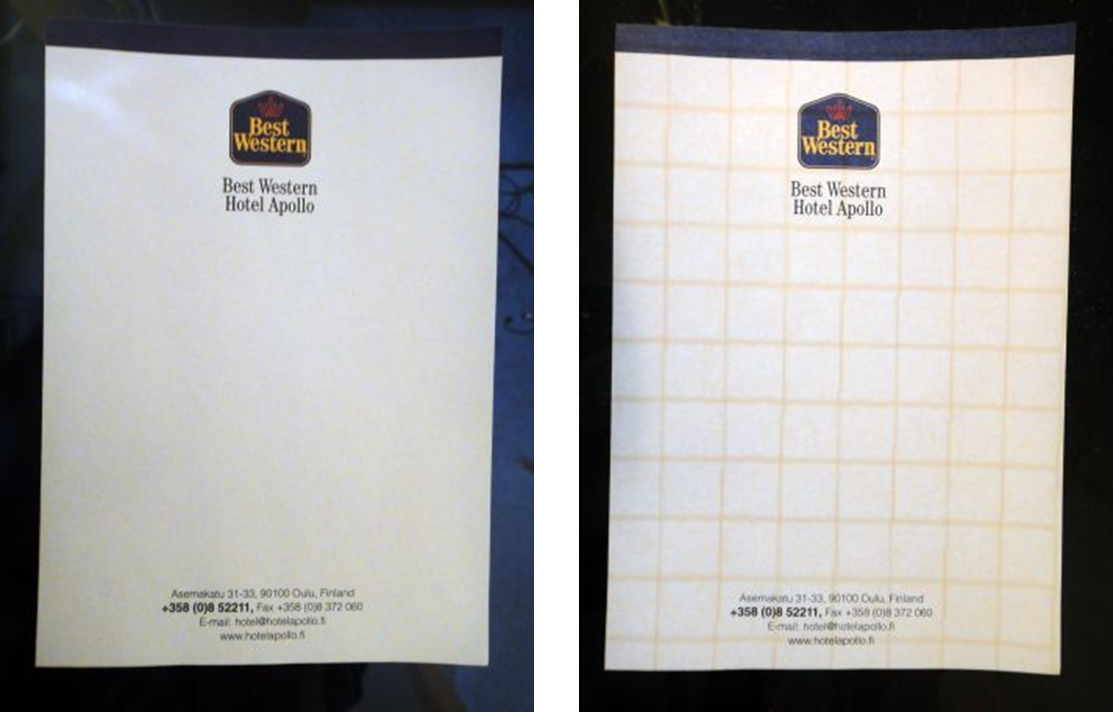
紙面のレイアウト整形支援のための補助線提示システム (2010年~)
本研究では,紙面の状態をカメラで認識し,その状態に応じた補助線を提示することにより,文章や図形作成時のレイアウト整形を支援するシステムを提案しています.このシステムの特長は,紙面に投影する付加情報を補助線に限定したことにより,計算機による支援を受ける場合と受けない場合で,視認性および操作性が殆ど変わらない事,対象が何のための紙面であるか,紙面に何を書こう/描こうとしているのか,という情報を与えることなく幅広い作業を支援できるという点です.試作システムを用いた簡単な実験により,レイアウト整形支援ができることを示しました.
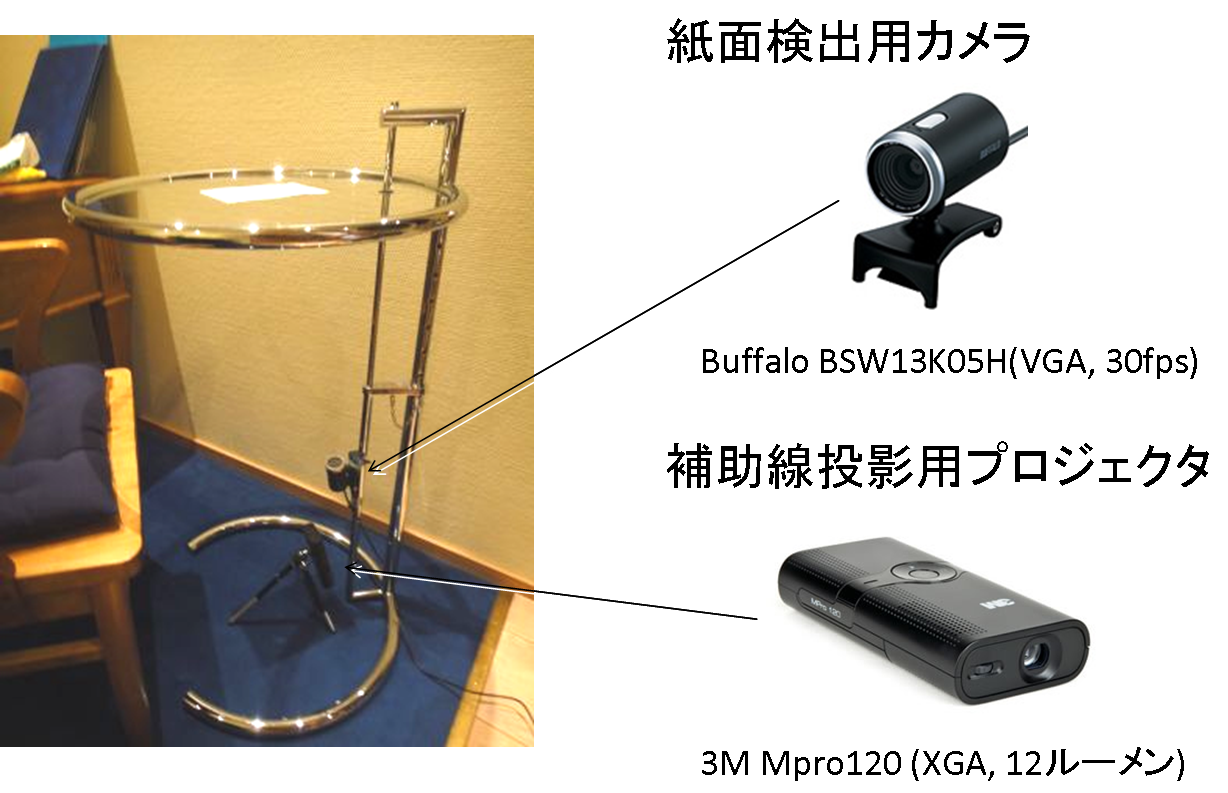
- 池田聖, 田中弘起, 眞鍋佳嗣, 千原國宏: "紙面のレイアウト整形支援のための補助線投影システム", 電子情報通信学会 技術研究報告, MVE2010-77(PRMU2010-152), pp.17-20, 2010/01/20.
未知環境での指示対象共有のためのAR強調表示 (2009年~)
本研究では,災害現場など予め計算機内にその環境に関する情報を準備しておくことができないような環境において利用者で指示対象部分を共有するために拡張現実感技術により強調表示するシステムを開発しています.試作したシステムでは,利用者がタッチパネル上をポイントすることにより対象部分を選択することができる.計算機は,タッチパネル裏に取り付けられたカメラからの映像により環境を三次元復元し環境の形状を取得し,形状に基づき複数の部分に解します.以上により,利用者は強調表示された指示対象部分を様々な角度から観察することができます.



- Sei Ikeda, Yoshitsugu Manabe, and Kunihiro Chihara: "Augmented Reality System for Visualizing 3-D Region of Interest in Unknown Environment," Proc. ACCV2010 Workshop on Application of Computer Vision for Mixed and Augmented Reality (ACVMAR2010), pp1-10, 2010/11/09.
- 小林政善, 池田聖, 井村誠孝, 眞鍋佳嗣, 千原國宏: "拡張現実感システムを用いた未知環境中の指示対象物の強調表示," 第13回画像の理解・認識シンポジウム(MIRU2010)論文集, pp1328-1329, 2010/07/28.
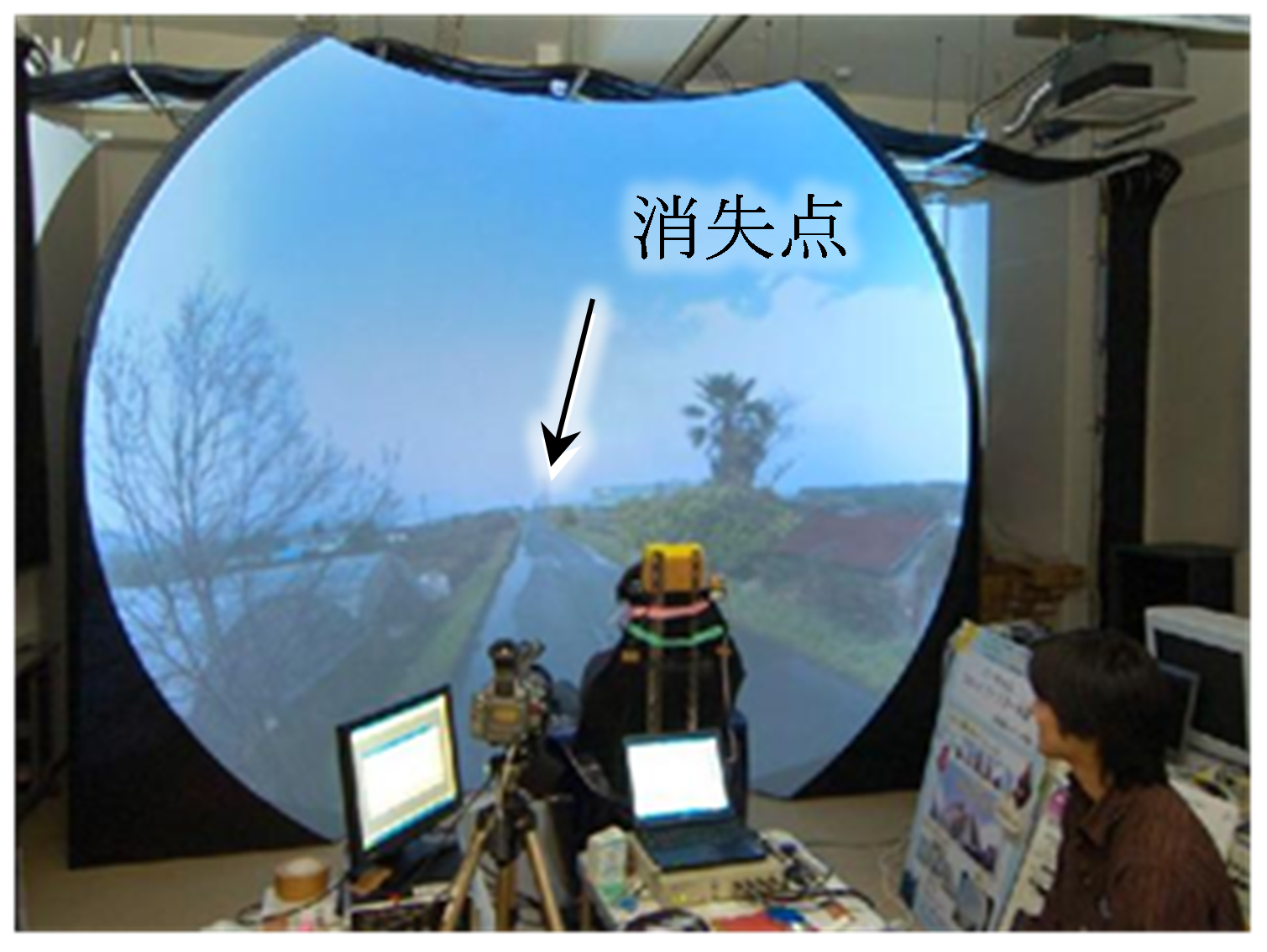
複合現実環境内での直線加速感の評価 (2007年~2009年)
本研究では,複合現実環境内でのヒトの直線加速感を測る客観指標として輻輳性眼球運動(vergence)の利用可能性について検討しています.今回,実写映像による視覚刺激とモーションチェアの後方傾斜による前庭刺激を与えながら,同時に輻輳性眼球運動を計測可能な複合現実環境を構築しました.この環境で,健常者5名を対象とし,映像刺激の有無,後方傾斜の有無の4条件を設定し,輻輳性眼球運動の位置と速度を調べました.その結果,後方傾斜有りでの映像刺激の有無の間,映像刺激無しでの後方傾斜有無によって,眼球運動の速度に有意な差があることが見つかりました.これは,両刺激が直線加速運動と錯覚されることを裏付ける結果で輻輳性眼球運動が直線加速感の評価指標として利用できる可能性を示しています.

- 池田聖, 和田佳郎, 柴田智広: "輻輳性眼球運動に基づく直線加速感評価のための複合現実環境の構築," 映像情報メディア学会誌, vol.64, no.2, pp244-247, 2010/02/01.
- 池田聖, 和田佳郎, 長谷川達央, 石田純一, 柴田智広: "輻輳性眼球運動を指標とした加速感増強のためのモーションプラットフォームの傾斜制御", 第13回日本バーチャルリアリティ学会大会論文集, pp. 650-653, 2008/09/25.
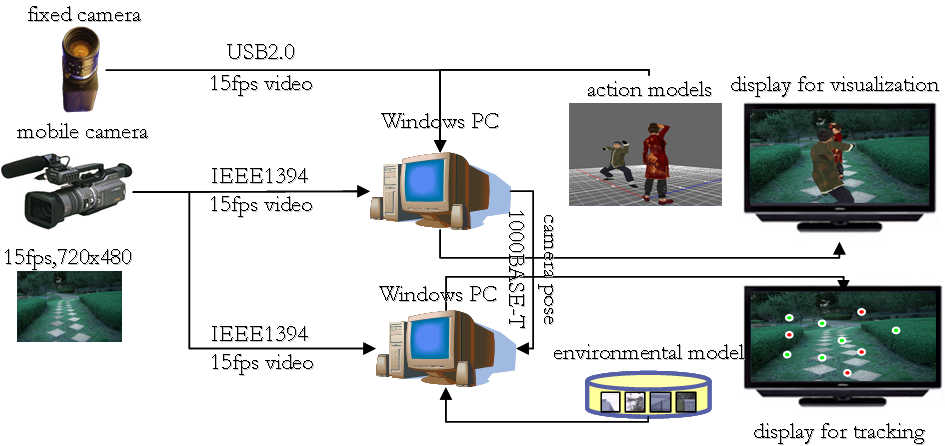
実時間カメラ位置・姿勢推定によるMR-PreViz (2006年~2007年)
映像制作の初期段階においては,舞台セットの準備や演者の時間を最小限するなどコスト削減のためにCGを用いてこれから撮影しようとするシーンをシミュレートするPre-Visualization(PreViz)をすることがが当たり前になってきています.本研究では,通常CGのみよりもPreVizをよりロケ現場での撮影に近づけるために背景映像に実写を用いたPreVizすなわちMR-PreViz(複合現実感技術Mixed Realityを用いたPreViz)の開発の一端を担いました.MR-PreVizを屋外ロケ現場で実現するためには,撮影されている映像からリアルタイムでカメラの位置と姿勢を求める必要があります.我々は,2007年奈良で開催された世界で最も注目される複合現実感に関する国際会議ISMAR2007において,実際に奈良県新公会堂の日本庭園にCGのカンフーアクション俳優を重畳表示することに成功しました.

- Sei Ikeda, Takafumi Taketomi, Bunyo Okumura, Tomokazu Sato, Masayuki Kanbara, Naokazu Yokoya and Kunihiro Chihara: "Real-time Outdoor Pre-visualization Method for Videographers -Real-time Geometric Registration Using Point-Based Model-", Proc. IEEE Int. Conf. on Multimedia and Expo (ICME2008), pp949-952, 2008/06/25.
- T. Taketomi, T. Sato, S. Ikeda, and N. Yokoya: "Real-time geometric registration of real and virtual worlds using a feature landmark database with priorities", Proc. Int. Workshop on Ubiquitous Virtual Reality, 2008/01. [pdf]
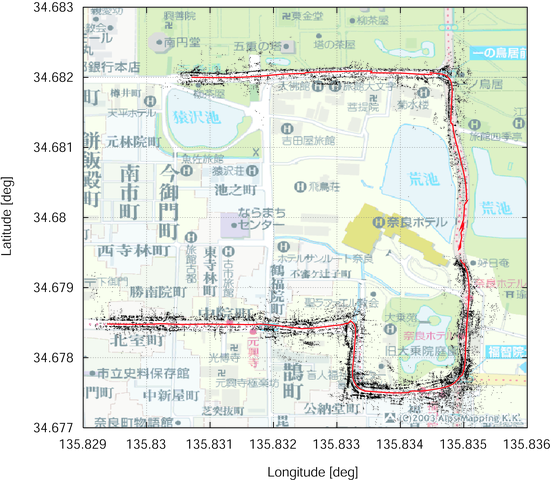
GPS測位に基づく全方位マルチカメラシステムの位置・姿勢推定(2004年~2006年)
複数のカメラで全方向の撮影が可能な全方位カメラを車載して街中を走れば,街中の道路沿いのあらゆる全方向の画像が取得でき,GPSを用いれば撮影された場所と画像を対応付けることができます.似たような技術として2007年に開始されたGoogleストリートビューが有名ですが,本研究では,2004年からStructure-from-Motionという画像から撮影対象の三次元形状を計算する技術とGPSの位置情報を組み合わせることにより,画素精度で画像上の1点と三次元位置を対応付ける技術を開発していました.


- S. Ikeda, T. Sato, K. Yamaguchi and N. Yokoya: "Construction of feature landmark database using omnidirectional videos and GPS positions", Proc. Int. Conf. on 3-D Digital Imaging and Modeling (3DIM), pp. 249-256, 2007/08. [pdf ]
- 横地裕次, 池田聖, 佐藤智和, 横矢直和: "特徴点追跡とGPS測位に基づくカメラ外部パラメータの推定", 情報処理学会論文誌:コンピュータビジョンとイメージメディア, Vol. 47, No. SIG5(CVIM13), pp. 69-79, 2006/03. [pdf]
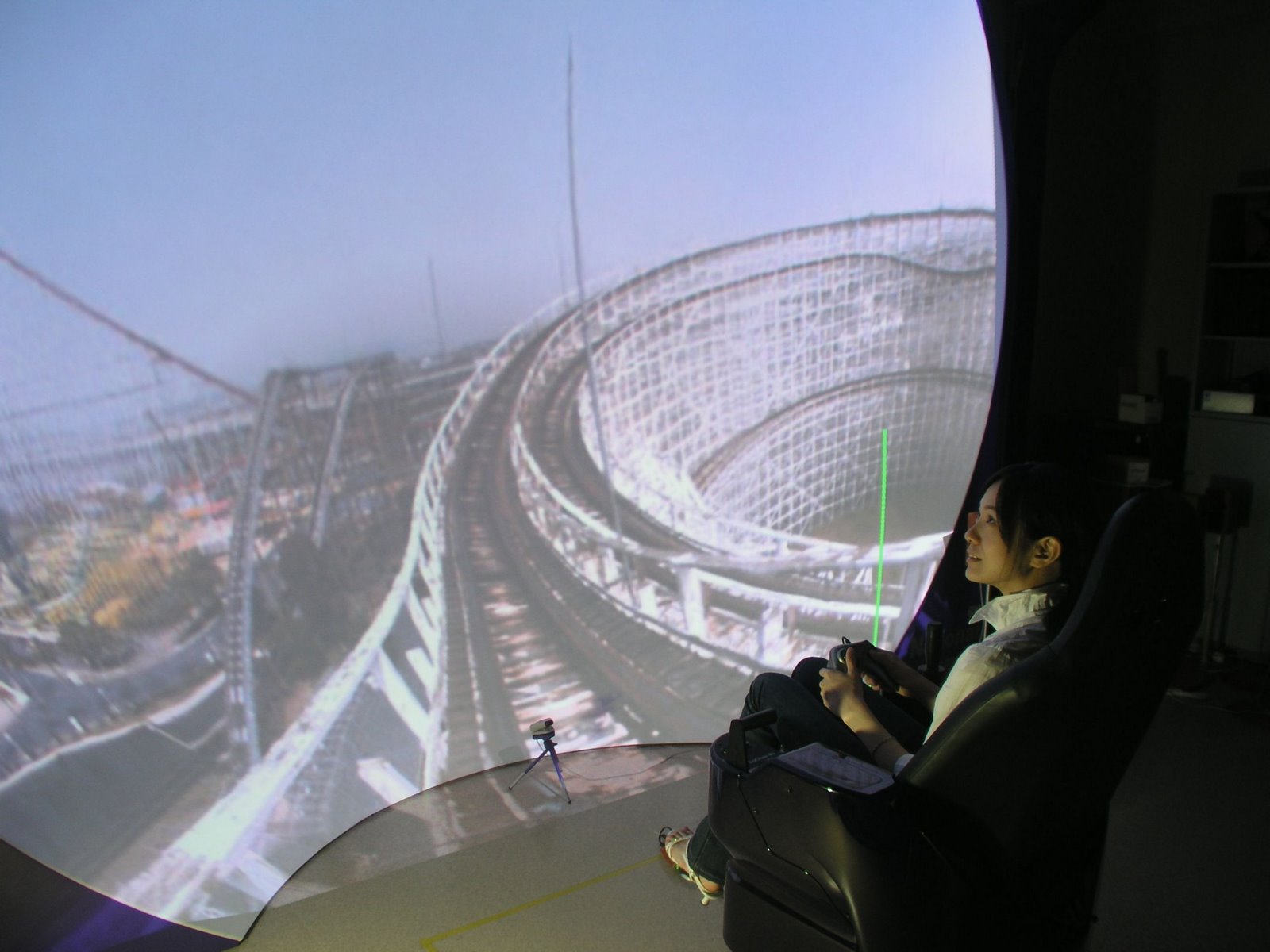
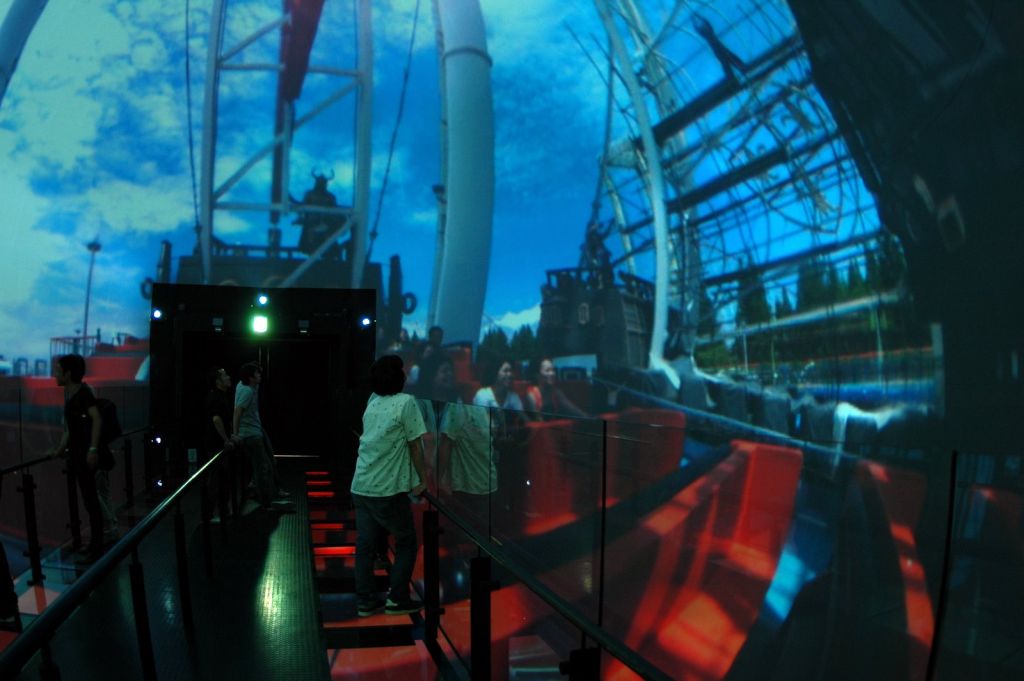
高解像全方位テレプレゼンスシステム(2003年~2005年)
全方位型マルチカメラシステムの様々な利用形態を示すために,蓄積型のテレプレゼンスシステムを開発しました.予め決められたコースで全方位映像を撮影しておきあとから自由な方向,自由な位置の映像を観察することができます.全方向の映像が取得できているので,様々な形のディスプレイで再生することができます.このようなテレプレゼンスシステムのコンテンツとして最も適したものの一つは,エンターテインメントシステムです.広い視野角かつ高解像度な映像により実際に動いていないにも関わらず動いているような錯覚を生じます.有名な絶叫系遊園地のジェットコースターで映像を撮影し,国立科学博物館のディスプレイで上映しました.

- S. Ikeda, T. Sato, M. Kanbara and N. Yokoya: "Immersive telepresence system with a locomotion interface using high-resolution omnidirectional videos", Proc. IAPR Conf. on Machine Vision Applications (MVA2005), pp. 602-605, 2005/05. [pdf]
- S. Ikeda, T. Sato, M. Kanbara and N. Yokoya: "An immersive telepresence system with a locomotion interface using high-resolution omnidirectional movies", Proc. 17th IAPR Int. Conf. on Pattern Recognition (ICPR2004), Vol. IV, pp. 396-399, 2004/08. [pdf]
- S. Ikeda, T. Sato, M. Kanbara and N. Yokoya: "Telepresence system using high-resolution omnidirectional movies and a reactive display", Proc. IEEE and ACM Int. Sympo. on Mixed Augmented Reality (ISMAR 03), pp. 292-293, 2003/10. [pdf]
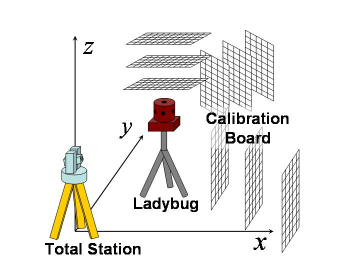
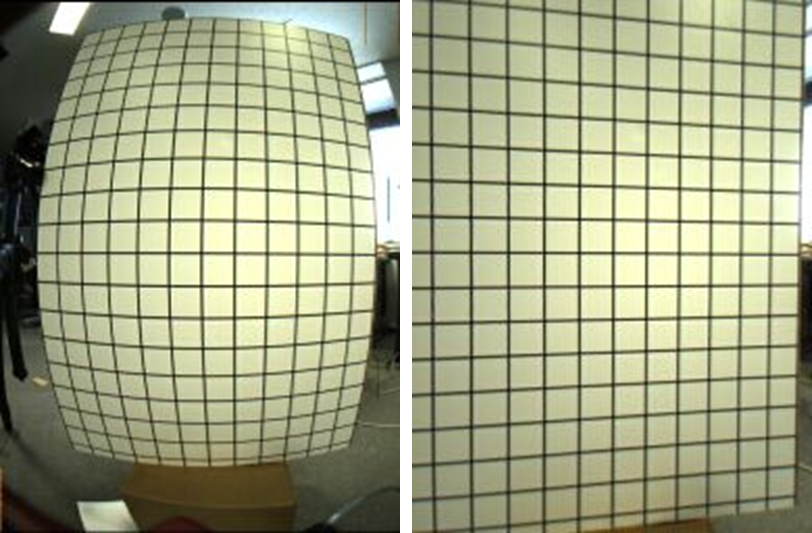
全方位型マルチカメラシステムのキャリブレーション(2002年~2003年)
全方位型マルチカメラシステムは,複数のビデオカメラが放射状外向きに配置,固定されたマルチカメラシステムです.このカメラは,従来から曲面鏡や魚眼レンズを介することにより水平360度を含む高視野角の映像を取得できる全方位カメラよりも,さらなる高解像度化,高視野角化,分解能の一様化が簡単で,しかし,三角測量などのコンピュータビジョンの技術をこのカメラに適用しようとすると,全方位であるがゆえ,多眼カメラであるがゆえキャリブレーションが難しいという問題がありました.

- 池田聖, 佐藤智和, 横矢直和: "全方位型マルチカメラシステムを用いた高解像度な全天球パノラマ動画像の生成とテレプレゼンスへの応用", 日本バーチャルリアリティ学会論文誌, Vol. 8, No. 4, pp. 443-450, 2003/12.
- S. Ikeda, T. Sato and N. Yokoya: "Panoramic movie generation using an omnidirectional multi-camera system for telepresence", Proc. 13th Scandinavian Conf. on Image Analysis(SCIA2003), pp. 1074-1081, 2003/07. [pdf]