A Calibration Method for an Omnidirectional Multi-Camera System
AbstractIn the field of computer vision, virtualization of outdoor scenes is widely investigated for three-dimensional (3D) reconstruction, telepresence, walk-through systems and so on. In such applications, an omnidirectional multi-camera system is more useful than a standard single camera system, because the multi-camera system can easily capture high-resolution images. However, the exact camera calibration is necessary to virtualize the real world accurately.We performed a geometric and photometric calibration of the omnidirectional multi-camera system using a total station and a calibration board. |
Omnidirectional Multi-Camera System
 |
 |
 |
 |
|
 |
 |
 |
||
| Ladybug : Camera Head Unit(left) and Storage Unit(right) | 6 Input Images | |||
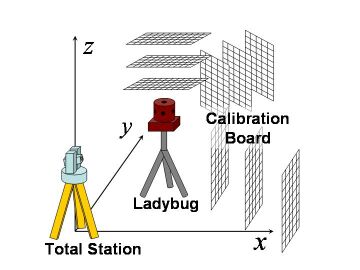
Calibration Method
In the geometric calibration, we use a plane board of grid pattern (calibration board) and Laser measurement system called the total station. The calibration board measured by the total station is used for geometric calibration of each camera. The proposed geometric camera calibration procedure consists of the following steps for each camera.(1)The calibration board is fixed in front of the camera and is captured.
(2)The four corners of the calibration board are measured by the total station and all 3D positions of markers on the board are estimated by linear interpolation among its corners.
(3)The calibration board is moved away from the camera.
(4)The steps (1) - (3) are iterated several times.
(5)Intrinsic parameters (focal length, lens distortion, center of distortion, and aspect ratio) and extrinsic parameters (position and posture of each camera) of the camera are estimated from all markers at different distances.
In our method, the total station must be fixed on the same position while the whole geometric calibration procedure is performed. Then, the 3D position of all markers captured by any camera can be represented in a single coordinate system made by the total station.
In the photometric calibration, the limb darkening and the color balance are corrected. The limb darkening is corrected for each with lens diameter and focal length by assuming the cos^4theta low model. The color balance is adjusted by equalizing the normalized RGB histograms of six images of the same scene captured by all the cameras under a fixed lighting condition.
 |
 |
 |
| Before | After |
Stitching Panoramic Image
 |
| Panoramic Image(Mercator Projection)[Movie 15Mb|3Mb] |
Presentation Using Spherical Display
 |
| Vision Station[Movie 33Mb|8Mb] |
English Publication
Contact & Link
IKEDA Sei
sei-i@is.naist.jp
NARA INSTITUTE of SCIENCE and TECHNOLOGY
(NAIST)
| URL | http://yokoya.naist.jp/~sei-i/research/ | NAIST | http://nara.naist.jp/index-E.html | |
| PHONE | +81-743-72-5296 | Graduate School of Infomation Science | http://isw3.naist.jp/IS/home-en.html | |
| FAX | +81-743-72-5299 | Vision and Media Computing Laboratory | http://yokoya.naist.jp/index-j.html |