研究紹介
高臨場感 VR 空間のための身体動作を用いた直接的操作環境の構築
◆概要◆
近年,バーチャルリアリティ技術の研究においては,大型ディスプレイ装置を用いた
没入型VR空間の構築により高い視覚的臨場感が実現されている一方で,現実空
間と同様な自然な動作で VR 空間にはたらきかけを行えるものは少ない.このた
め,VR空間にはたらきかけを行う際には,VR空間と現実の自分との間にギャッ
プを感じてしまい,臨場感を損なってしまう恐れがある.
本研究では,操作における臨場感を考慮し,没入型VR空間において提示され
た情報を身体動作によって直接的にはたらきかけ可能な操作環境を提案する.
試作システムを構築しユーザビリティ評価を行うことにより,身体動作によ
る直接的なはたらきかけの有効性を検証した.身体動作の計測は.操作者の自由
な行動を妨げないために,非接触による計測が可能な光学式モーションキャプチャ
システムを採用した.得られた身体動作を大局的動作,局所的動作および遠隔へ
の指示動作に分類することで,操作者が意図した操作の適切な認識を実現した.
提案システムは,視覚的な臨場感のあるVR空間において,現実空間と同様な身
体動作を用いた直接的な操作環境を提供する.
◆提案システム◆
本研究では,大型ディスプレイを用いた没入型VR空間での入力環境として,
身体動作を用いた直接的操作が可能な入力システムを提案する.
提案するシステムの概要を図1に示す.
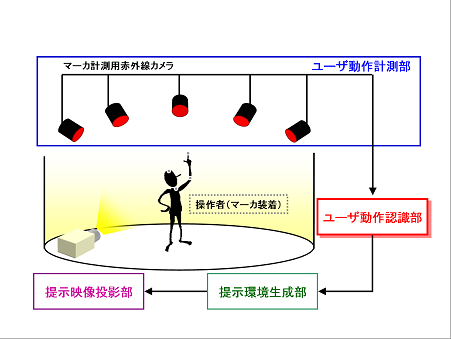
<図1>提案システムの概要
映像提示装置には,操作者の周囲330度を囲うように設置された円筒型スク
リーンと6台のプロジェクタおよび,VR空間レンダリング用の超高速三次元グ
ラフィックワークステーション(SGI Onyx(R) 3800)を用いた.
また,没入型VR空間における操作者の自由な行動を妨げず,操作者
の身体動作を非接触な方法で計測可能な,赤外線カメラを用いた光学式モーショ
ンキャプチャシステムを採用した.提案システムのように,操作者の全周にプロ
ジェクションによって映像を提示する大型ディスプレイ型VR空間では,提示
される映像は時間と共に移り変わっていくため,操作者の存在する現実環境での
照明条件や背景状況は頻繁に変化する.光学式モーションキャプチャシステムは,
可視画像を用いた画像認識システムなど他の非接触な認識システムを用いる場合
と比べ,撮影画像からマーカのみを抽出するため,マーカを貼り付けた身体部位
の位置情報から比較的簡単に操作者の動作を認識できるという利点がある.
提案システムは以下の四つのモジュールからなる.
●ユーザ動作計測部
●ユーザ動作認識部
●提示映像生成部
●提示映像投影部
ユーザ動作計測部では,操作者の頭,腕,手など身体各部に貼付されたマーカ
を光学式モーションキャプチャシステムを用いて計測する.まず環境内での操作
者の行動範囲を包括して撮影ができるように6台の赤外線カメラを設置し,撮
影を行う.撮影された複数の画像からマーカを抽出し,ステレオ法により各身体
部位のマーカの三次元位置を算出する.
ユーザ動作認識部では,ユーザ動作計測部で得られた各マーカの三次元位置か
ら,操作者の身体動作を認識する.提案システムでは,操作者の意図するはたら
きかけは身体動作に反映されると考え,はたらきかけの際の身体動作をいくつか
の基本的な動作に分類し,基本動作の組み合わせにより操作者のはたらきかけの内容を識別する.
ユーザ動作計測部で得られたマーカ情報から,対応する操作者の身体部位を認識し,
各身体部位の動作を基本動作とする.
提示映像生成部では,ユーザ動作認識部において得られた操作者のはたらきか
けが適切に反映された空間を構築するために,必要となる三次元映像を生成し円
筒型スクリーンに投影する.操作者に対して自らのはたらきかけが反映された映
像を提示することで,視覚的なフィードバックを与え,操作における臨場感を実
現する.
提案システムでは,身体動作は赤外線カメラによって非接触で計測されるため,
操作者は反射材マーカ以外,操作者に拘束感を与えるような計測デバイスを装着
する必要がなく,VR空間内での操作者の行動も制限されない.そのため,操作
者は没入型VR空間内で視覚的な臨場感を得ながら,VR空間内の移動可能領域
を自由に移動することができる.また,提示されたバーチャルな対象に自然な身
体動作を用いて直接的にはたらきかけることが可能となる.
認識の対象とする動作は以下の3つである.
<i>大局的動作(移動や視点変更)
<ii-1>近接対象へのはたらきかけ
<ii-2>遠隔対象へのはたらきかけ
大局的動作を認識するために,ユーザの位置や向きをマーカ情報からする.
また近接対象へのはたらきかけは,手を用いて行われると考え,腕や手の動作をマーカから計測し,認識する.
一方,遠隔対象へのはたらきかけは,ユーザの意図するはたらきかけの方向を正しく認識する必要があり,
一般的に対象の方向や個人によって差異が生じる.
本研究では,複数の身体部位よりはたらきかけの方向を推定することで,
遠隔対象へのはたらきかけを正しく認識する.
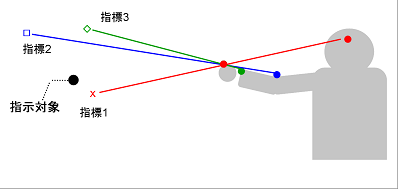
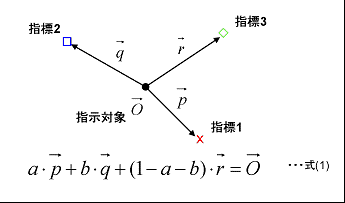
<図2>指示動作の推定
>>実験
Back to Research Top
Back to Top Page