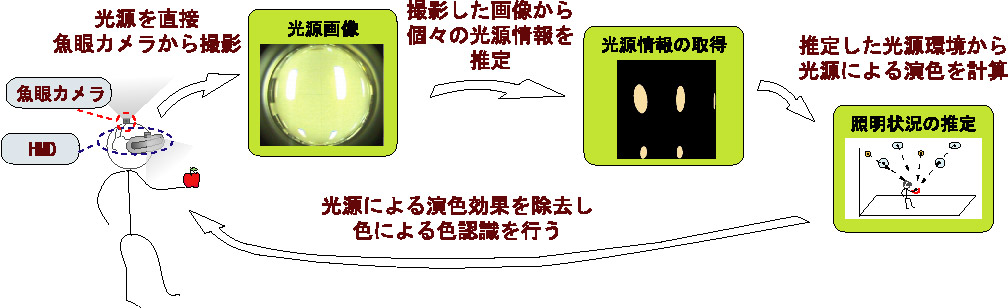
図1. システム概要
ウェアラブルコンピュータ等の移動環境で使用するシステムにおいて、物体認識処理に色情報を用いる場合、光源環境による演色により物体の見かけの色が変化するので、認識処理が複雑になってしまう。光源による演色の度合いは、主に物体から光源までの距離、物体からみた光源の方向、光源色に影響される。これらの情報を取得できれば, 光源による演色の除去が可能となり、物体色の再現や、任意の光源による演色も再現可能となる。そこで、光源自体を直接撮影し、その場の光源環境を推定する手法を提案する。
本手法では図1のように、補正対象のカメラとは別に専用の魚眼カメラを装着し、光源を直接撮影する。次に、撮影された画像から個々の光源の位置、方向、色を推定し、光源環境を構築する。構築した光源環境から指定された場所の演色の度合いを計算し、それをもとに補正対象のカメラの画像を補正していく。
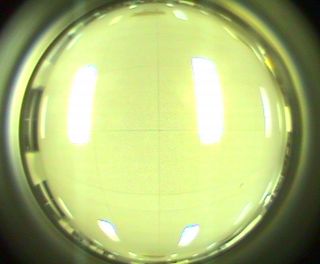
魚眼カメラで撮影された画像を天井に見立てた仮想平面に展開し、光源の形状と色を推定する。
 |
 |
図2(a). 展開前の光源画像 |
図2(b). 展開後の光源画像 |
本手法では光源形状を楕円形状に近似する。これは、光源の形状は一般的に方形、円形のいずれかであり、楕円近似するほうが、多角形近似するより情報が少なく、また、扱いやすいからである。従って、個々の光源の形状情報は、
・中心座標
・主軸角
・長軸長、短軸長
を取得すればよい。
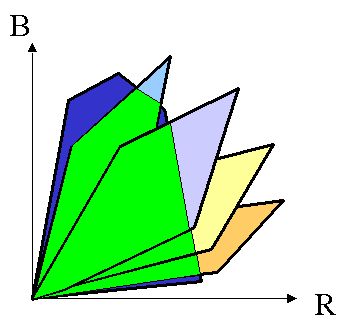
光源は一般的に光量が大きく、直接撮影すると画素値が飽和して、正しい光源色が取得できない。そこで、光源の周囲からの光は、その光源光からの反射光のみであるとし、さらに、周囲の物体色は白色またはそれに類する色であると仮定する。この仮定から、既存の光源色推定手法を適応することができる。本手法ではセンサ相関法[1]を、簡略化したものを用いる。変更点は、各色温度の光源色域の代わりに傾きを使用し、光源色域と画像色域を比較する部分を、色温度の傾きと画像色域の重心の傾きの比較に変更した点である。
 |
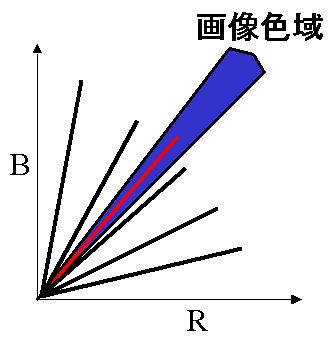 |
図3(a). 変更前の比較モデル |
図3(b). 変更後の比較モデル |
取得した光源情報から、任意の位置での演色の度合いを推定することができる。本手法では、補正対象の表色系をRGBとし、その比を変更することで演色効果の除去や、任意の光源環境によって演色された色への変更を行う。
 |
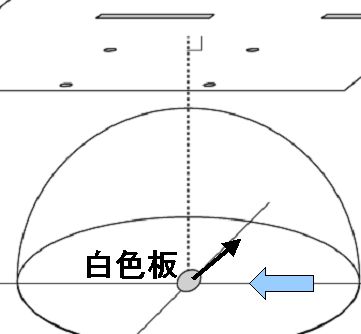 |
図4. 実験用光源環境 |
図5. 白色板のセッティング |
計測値と推定値のRGB表色系における値と均等色空間における色差は表1のようになった。

この研究の詳細についてはこちら(pdf)をご覧下さい。