背景パターンを利用した
透明物体の形状と屈折率の計測手法
-
はじめに
-
提案手法
-
基礎実験・結果
-
まとめ
はじめに
現在,様々な物体がデジタル化され,コンピュータグラフィックス(CG)の技術により,実世界と同様な状態で再現できるようになってきた.しかし,実物体を様々な状況で再現する際には,形状などその物体の特徴をパラメータ化する必要がある.
一般に,物体の形状計測法には接触型と非接触型の2つがある.接触型の手法では,測定する際に物体の表面に直接触れるため,やわらかいものや壊れやすいものには適用できない.
一方,非接触型の手法では,物体表面の拡散反射成分を用いて,物体の形状を計測するものが多い.しかし,材質が透明な物体では物体表面の拡散反射成分を計測することが出来ないため,この手法を適用することはできない.つまり,現状では透明物体の非接触な形状計測法は確立されていないといえる.
これまでの透明物体の形状計測手法として,宮崎らの可視光と赤外光による偏光度の解析に基づいた透明物体の形状計測法がある.しかし,この手法は透明物体の屈折率が必要となるため,材質が未知である透明物体には適用できない.
そこで本研究では,凸型で材質が一様である透明物体の形状と屈折率の計測法を提案する.この手法ではシルエット法を使って透明物体の形状を測り,屈折による背景パターンの変化により,透明物体の屈折率を求める.
提案手法
本手法では,物体表面の拡散反射光の代わりに,シルエット法を使って透明物体の形状を計測する.シルエット法とは物体の輪郭を抽出し,その輪郭を用いて物体の形状を計測する手法である.透明物体においては,背景にパターンを用いると屈折によりパターンが変化するため,背景との差分から輪郭を求めることができる.この手法では,透明物体の屈折による背景パターンの変化を利用するため,材質が未知である透明物体でも計測することができる.
また透明物体の屈折率は,光路と計測した透明物体の形状を利用して決定する.透明物体の光路は背景から透明物体を通って現れる点の動きから求める.
シルエット法
あるパターンの前に透明物体を置くと,透明物体の輪郭に沿ってパターンは変化する.透明物体の姿勢が既知であるとき,このパターン変化と背景パターンの差分を求めると,透明物体の輪郭が抽出できる.透明物体を回転させ,透明物体の輪郭を各角度ごとに抽出し,抽出した輪郭を用いて透明物体の形状を求める.
この手法では,背景パターンを撮影した背景画像(図1左)と透明物体を含む計測画像(図1右)の2つの画像を取得する.背景画像と計測画像の差分を求めるときに,より正確な差分を求める必要がある.そこで,本手法では空間コード画像を用いる.
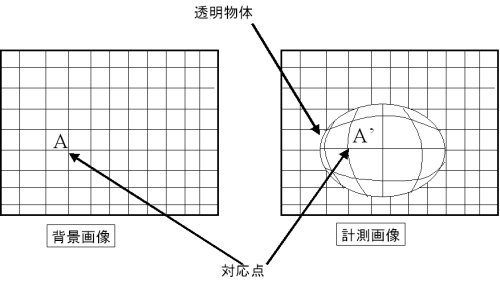
図1 対応点
屈折率の計算
本研究では平行投影を仮定しているため,透明物体の屈折率は光路と形状により一意に決定することができる.図2は光が背景から透明物体を通過し,カメラ平面に到達する過程を示した概念図である.背景上のある点Aから出た光が透明物体により屈折し,カメラ平面上に到達する点をA'とする.また,Aから出た光が透明物体に入射する点をP1,透明物体から出射する点をP2とする.さらに,P1での法線ベクトルをN1の入射角をθ1iとすると
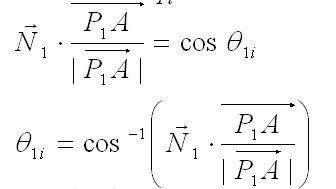
となる.また,屈折率をθ1oとすると
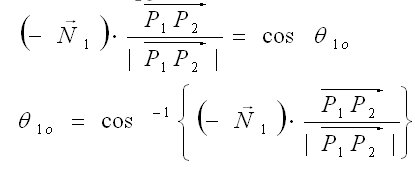
となる.屈折率をnとすると,スネルの法則,θ1i,θ1oより,
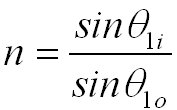
と表すことができる.さらに同様の過程で,θ2iとθ2oを使って屈折率を求めることができる.
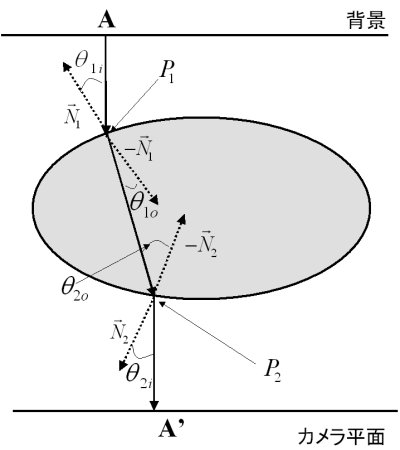
図2 光路
実験・結果
本手法の有効性を示すためにアクリル製の球を計測した.本稿の提案手法では,背景画像から計測画像への対応点の移動を求めるために,水平方向と垂直方向のグレイコードを用いて,2次元の空間コード化を行った.空間コード化の際に,グレイコードはバイナリコードよりも変換誤差が少ないのが特徴である.
図3は本実験で用いた装置である.透明物体の1姿勢に対し,背景パターンは8ビットのグレイコードを用いた.物体の回転角度は10度刻みで回転させ,計36姿勢の画像を測定した.
抽出した輪郭を用いて再現した球形を図4に示す.この結果より球の形状の再現には成功していることがわかる.形状と光路から求めた屈折率を図5に示す.一部他の値と比べてずれているものがあるが,だいたい2程度の値になった.

図3 実験装置
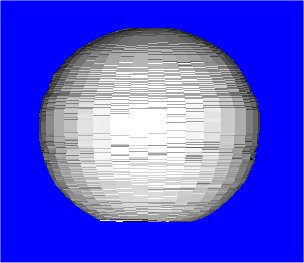
図4 再現結果
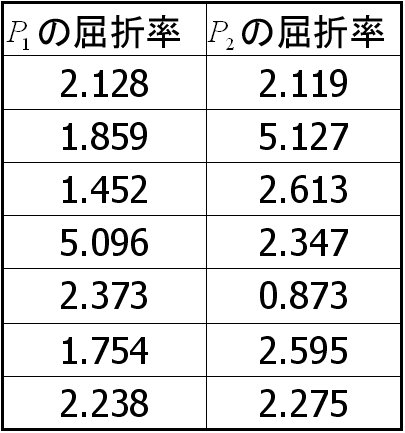
図5 屈折率
まとめ
本稿では背景パターンの変化を利用した透明物体の形状と屈折率を測定する手法を提案した.実験により,形状の再現ができることを確認した.屈折率の推定結果は実際のアクリルの屈折率1.5との誤差が大きくなった.これは平行投影を仮定していることが影響していると考えられるので,再帰的に光路と屈折率を計算することで推定結果の精度を上げることが可能と考える.
戻る